I am new to Dynare. I wonder if it’s possible to add shock to the expectation of an exogenous variable.
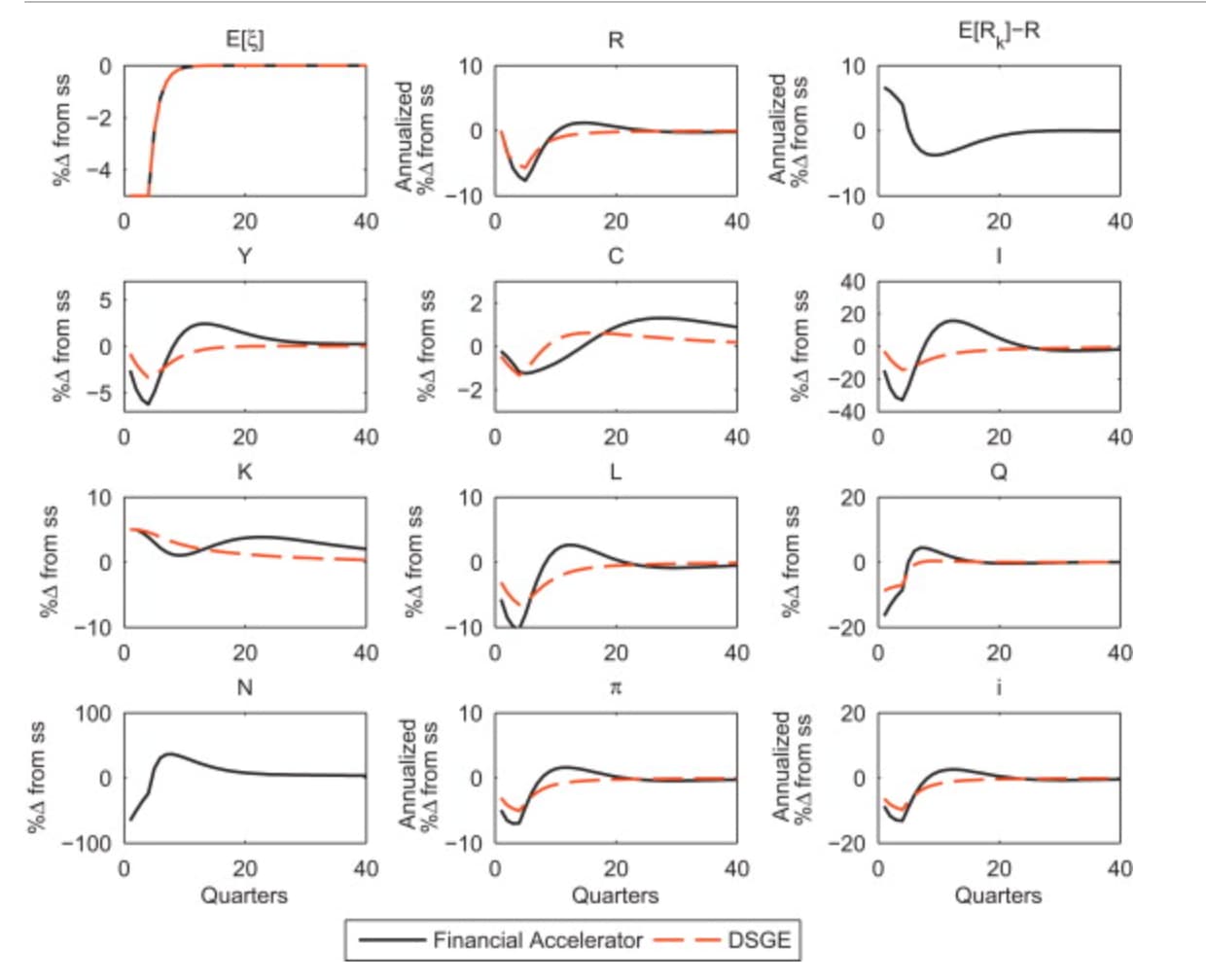
To be more clear, I am thinking about doing something similar to the news shock experiment (figure 6) in Gertler and Karadi (2011). In the top left figure, the expectation of capital quality remains low for 4 quarters and then went back to normal. I would greatly appreciate it if anyone can share some insights on this.
Thanks, professor. Your news shock sample code is super helpful!
Could you explain more about doing this using perfect foresight simulation? Is this for simulating an unrealized shock in deterministic circumstances? My understanding is that under perfect foresight, agents know the whole path of exogenous variables. So if we use perfect foresight simulation, agents will do nothing because they know that the news shock will not be unrealized?
Dear professor, I am so sorry. My model is highly nonlinear,so I need to solve it with global method. In this process, the shock that following AR(1) can be approximated by tauchen method or Rouwenhorst method. But, what about expectation shock, how can I deal with it? For example, the TFP shock is A_t=\rhoA_{-1}+\epsilon_{t-4}Thank you very much.
As I wrote above, you may need to enlarge the state space so that you have one shock and four states due to the lags. Then you can use standard techniques.
Thank you professor. So (1) Do I just need to think of lag shocks as separate state variables and not consider their time? That is, if there are four period lags, only four state variables are introduced, and the others are not considered.What’s the role of time? How do I make sure it’s four period shocks and not four shocks at the same period (2) If I consider a lag of 8 periods, do I have 8 additional state variables? (3) Are there any relevant papers or books to recommend
Lagged shocks become a state variable that is to other lags via an equation.like eps_lag=eps(-1)
That makes sure the timing is preserved instead of having separate shocks. That is the whole point of augmenting the state space.
Yes, you would have 8 adidtional states in that case.
Thank you professor. Is it true that when I slove the policy function, they are essentially four shocks, regardless of time. It’s only when I’m calculating the impulse response that I need to focus time and make the shock lag.Thank you very much again.