Hello,
I read the manual for Dynare 6 version for the learnt_in command. Is there another reference for the specific algorithm or paper in order to understand the mechanics of the learns/PF with errors simulation?
Thanks
Hello,
I read the manual for Dynare 6 version for the learnt_in command. Is there another reference for the specific algorithm or paper in order to understand the mechanics of the learns/PF with errors simulation?
Thanks
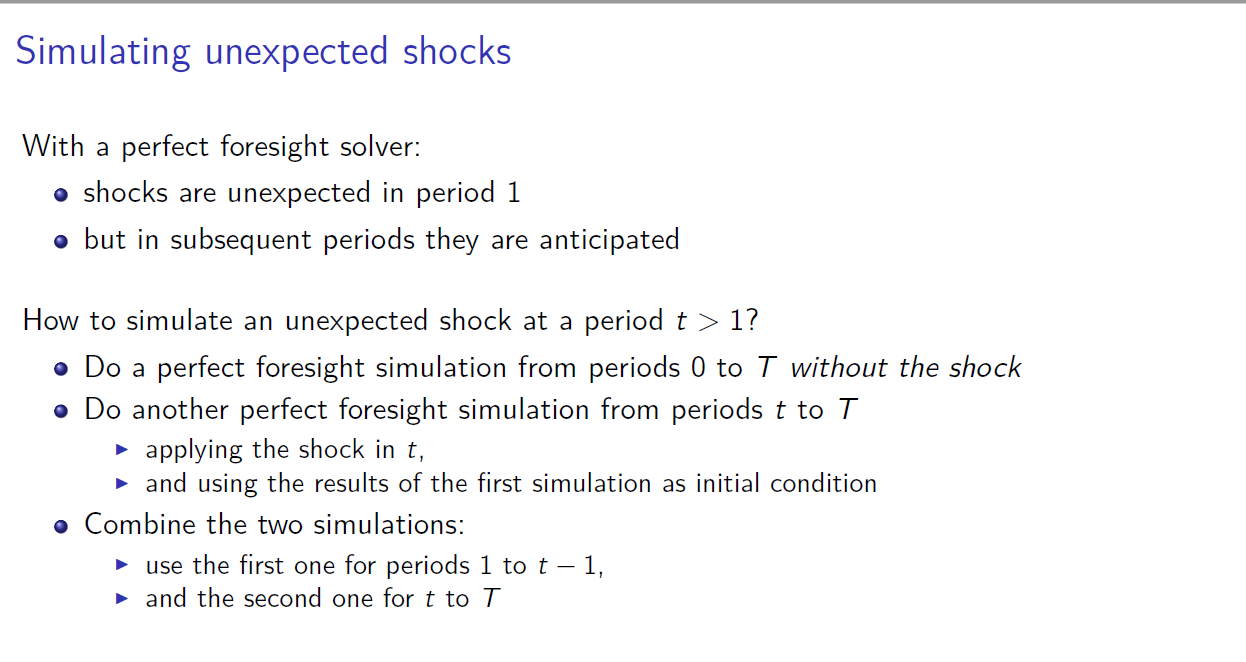
Section 5 of deterministic.pdf · master · Sébastien Villemot / perfect-foresight-slides · GitLab
explains it in more detail:
In a nutshell, you concatenate a sequence of perfect foresight simulations with changing initial conditions that depend on the previously computed path.