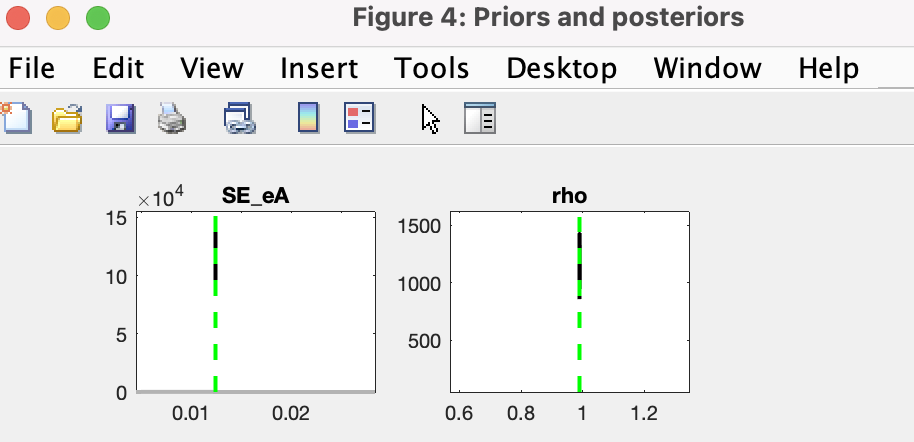
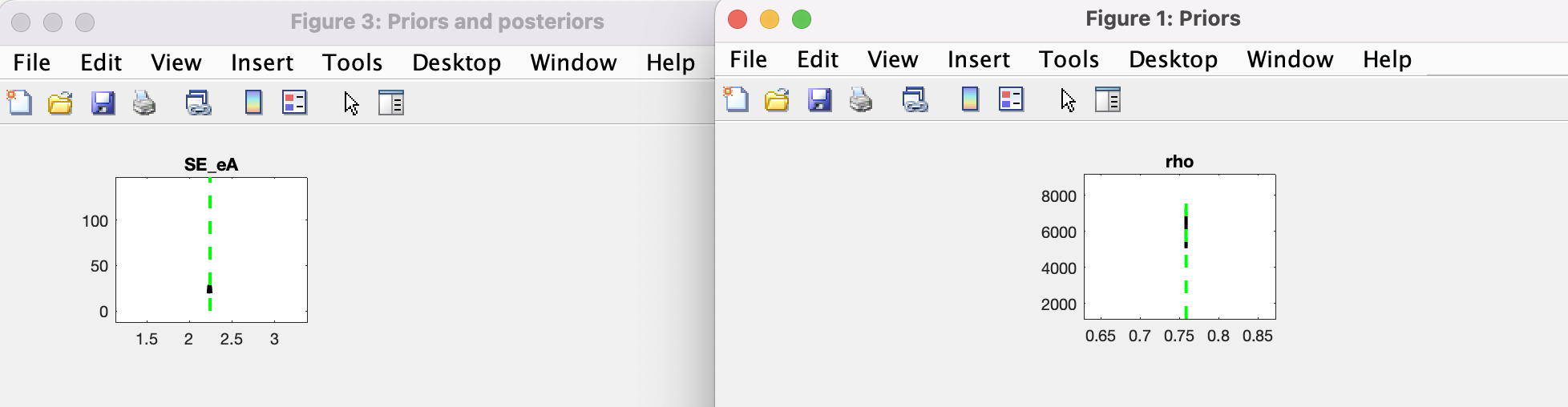
I have a non-linear model to estimate the parameters. The log data are seasonally adjusted and changed by hp-filter. So i construct functions of y_obs and c_obs to fit the original y and c. The problems lie in that the posteriors peek in vertical line like this picture:
Some key info of the model:
parameters …
rho = 0.75;
model;
tr - tr0 = rho * (tr(-1) - tr0) - (1-rho)( psi_b(b-STEADY_STATE(b)) + psi_y *(y-STEADY_STATE(y)) ) + eTr ;
y_obs = log(y);
c_obs = log(c);
shocks;
var eTr;stderr 0.01;
var eA; stderr 0.01;
var eR; stderr 0.01;
end;
stoch_simul(order=1, irf=200);
estimated_params;
stderr eA, inv_gamma_pdf,0.01,0.005;
rho, beta_pdf, 0.75, 0.15;
% mu, beta_pdf, 1, .04;
estimated_params_bounds;
stderr eA, 0.001, 0.1;
// the following is optional
// Initial values for the parameters in the estimation, pre-set to the optimum..
estimated_params_init;
stderr eA, 0.01;
rho, 0.75;
% mu, 1.0;
end;
rho, .001,.99;
varobs y_obs c_obs; %A
estimation(datafile=Jack_hpfilter, nobs=59, first_obs=1, mode_compute=6,mh_replic=20000, mh_nblocks=2, mh_drop=0.3,forecast=8, plot_priors=1)y_obs c_obs;