Thanks a lot for looking into this Johannes - appreciated!
On the first point you raise (if I understand it correctly): could this not be due to the fact that the shock sequences used for negative GIRFs are equal to minus the shock sequences used for the positive ones? That way of computing generalized impulse responses would ensure that any differences are only caused by policy function asymmetries, as opposed to sampling uncertainty? This would be why I’d expect the sum of these in a linear model to give something close to (machine precision) zero, and why the differences in variances would also be small?
Even if not the case however, shouldn’t IRFs in a linear model be base independent? Meaning that even if the underlying shocks were not mirror images of one another, the stochastic ‘base’ used for IRF computation should play no role (numerically, probably slightly larger differences than if the procedure above was used, but still close to zero)? I may be missing your point, of course…
I’ve now quickly compared the output of dynare++ v.4.2.5 and v.4.3.0 (generated by compiling the same .mod file attached initially) - and I think the results are quite interesting:
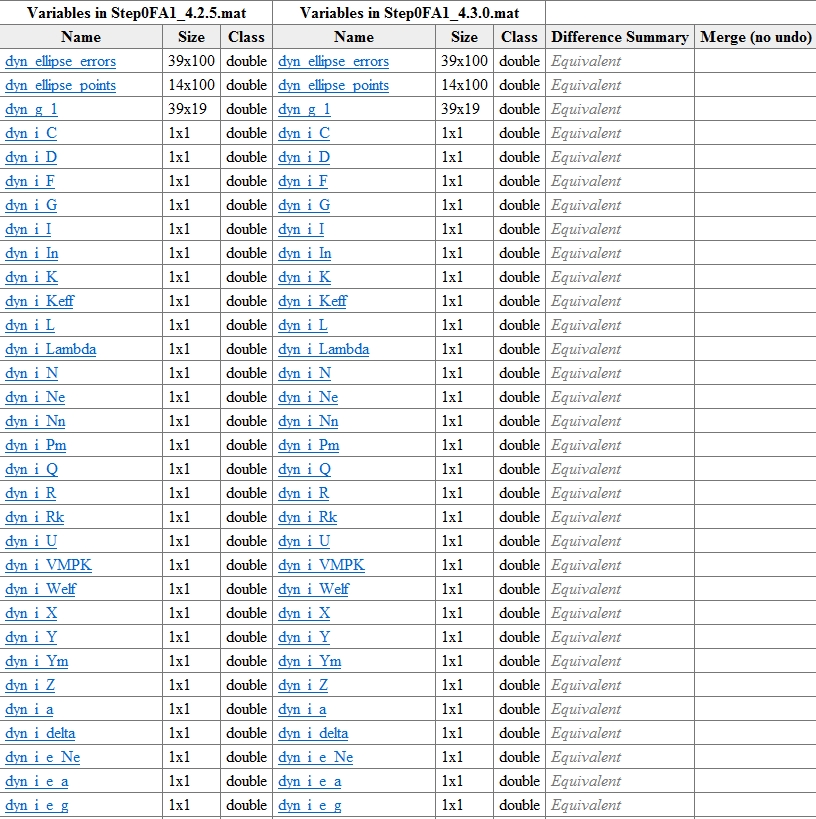
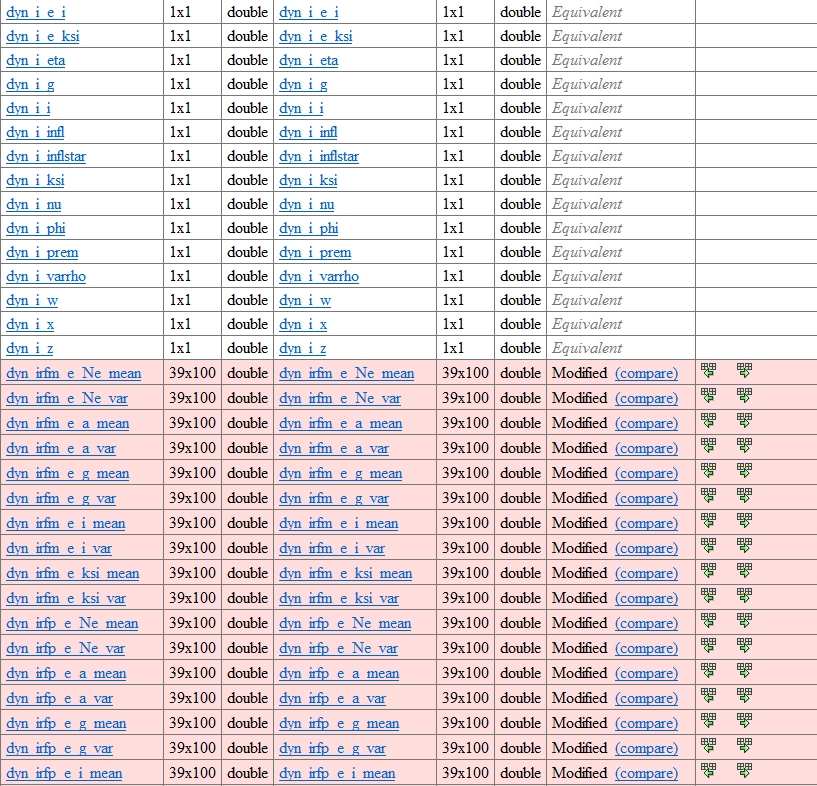

Specifically, the comparison suggests that the only things that differ are the IRFs - both the positive and negative ones. Things like policy function coefficients, Euler equation residuals, means, variances etc. are identical between both versions… Not sure this is helpful or helps narrow the issue down - but thought I’d throw it into the mix.
Thanks again!
Pawel